
Course Description
This course uses computer-aided design methodologies for synthesis of multivariable feedback control systems. Topics covered include: performance and robustness trade-offs; model-based compensators; Q-parameterization; ill-posed optimization problems; dynamic augmentation; linear-quadratic optimization of controllers; …
This course uses computer-aided design methodologies for synthesis of multivariable feedback control systems. Topics covered include: performance and robustness trade-offs; model-based compensators; Q-parameterization; ill-posed optimization problems; dynamic augmentation; linear-quadratic optimization of controllers; H-infinity controller design; Mu-synthesis; model and compensator simplification; and nonlinear effects. The assignments for the course comprise of computer-aided (MATLAB®) design problems.
Course Info
Learning Resource Types
notes
Lecture Notes
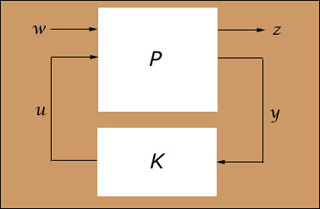
The system above shows a plant (P) which is a finite order linear time-invariant (LTI) feedback system with two inputs, w (disturbance) and u (actuator), two outputs, z (cost) and y (measurement), and a feedback controller (K). (Image courtesy of OCW.)







