
Course Description
This course is the second subject of a two-term sequence on modeling, analysis and control of dynamic systems. Topics covered include:
- kinematics and dynamics of mechanical systems, including rigid bodies in plane motion
- linear and angular momentum principles
- impact and collision problems
- linearization about …
This course is the second subject of a two-term sequence on modeling, analysis and control of dynamic systems. Topics covered include:
- kinematics and dynamics of mechanical systems, including rigid bodies in plane motion
- linear and angular momentum principles
- impact and collision problems
- linearization about equilibrium
- free and forced vibrations
- sensors and actuators
- control of mechanical systems
- integral and derivative action, lead and lag compensators
- root-locus design methods
- frequency-domain design methods
- applications to case-studies of multi-domain systems
Learning Resource Types
assignment_turned_in
Problem Sets with Solutions
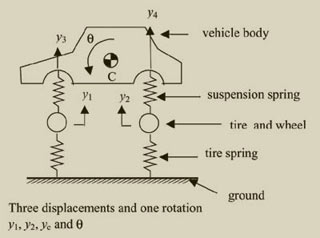
Conceptual diagram of a car’s suspension. (Courtesy of Prof. Triantaphyllos Akylas.)





