
Course Description
This class introduces elementary programming concepts including variable types, data structures, and flow control. After an introduction to linear algebra and probability, it covers numerical methods relevant to mechanical engineering, including approximation (interpolation, least squares and statistical regression), …
This class introduces elementary programming concepts including variable types, data structures, and flow control. After an introduction to linear algebra and probability, it covers numerical methods relevant to mechanical engineering, including approximation (interpolation, least squares and statistical regression), integration, solution of linear and nonlinear equations, ordinary differential equations, and deterministic and probabilistic approaches. Examples are drawn from mechanical engineering disciplines, in particular from robotics, dynamics, and structural analysis.
Course Info
Learning Resource Types
theaters
Demonstration Videos
menu_book
Open Textbooks
assignment
Problem Sets
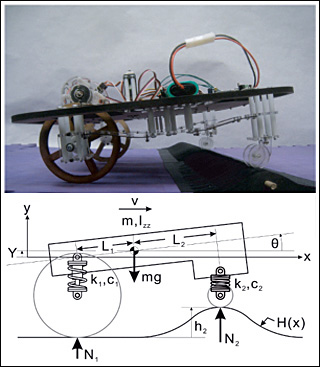
The 2.086 Mobile Robot suspension system. (Photo and diagram courtesy of James Penn. Used with permission.)







