
This unit focuses on analyzing the behaviors of systems. General principles for developing mathematical models of systems are developed in the context of using feedback in control systems, with tangible applications in robotic steering.
| Topics | difference equations, system functions, controllers |
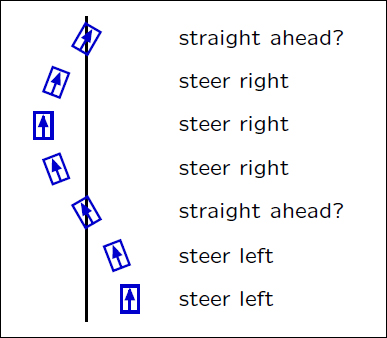
| Lab Exercises | robotic steering |
| Theme | modeling complex systems, analyzing behaviors |
Looking for something specific in this course? The Resource Index compiles links to most course resources in a single page.







