
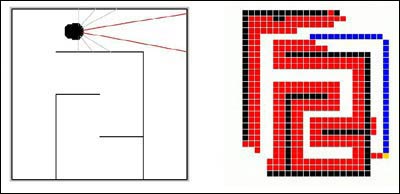
After a brief introduction to probability theory and computational search strategies, this unit focuses on modeling uncertainty and making robust plans. Robotic applications include mapping an unknown space, determining one’s location in a known space, and plotting a route through a maze.
| Topics | Bayes’ theorem, search strategies |
| Lab Exercises |
Mapping: drive robot around unknown space and make map Localization: give robot map and ask it to find where it is Planning: plot a route to a goal in a maze |
| Theme | robust design in the face of uncertainty |
Looking for something specific in this course? The Resource Index compiles links to most course resources in a single page.







