
Course Description
This course is the first of a two term sequence in modeling, analysis and control of dynamic systems. The various topics covered are as follows: mechanical translation, uniaxial rotation, electrical circuits and their coupling via levers, gears and electro-mechanical devices, analytical and computational solution of …
This course is the first of a two term sequence in modeling, analysis and control of dynamic systems. The various topics covered are as follows: mechanical translation, uniaxial rotation, electrical circuits and their coupling via levers, gears and electro-mechanical devices, analytical and computational solution of linear differential equations, state-determined systems, Laplace transforms, transfer functions, frequency response, Bode plots, vibrations, modal analysis, open- and closed-loop control, instability, time-domain controller design, and introduction to frequency-domain control design techniques. Case studies of engineering applications are also covered.
Course Info
Learning Resource Types
theaters
Demonstration Videos
grading
Exams
assignment
Problem Sets
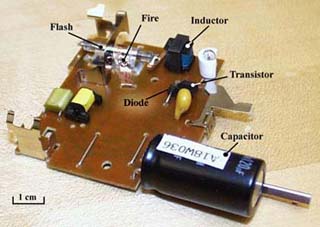
The vital electric components of the flash circuitry in a single-use disposable camera. In this device, a LC circuit generates a high voltage to fire the flash bulb. (Image by Prof. David Trumper.)





