
3-016f05.jpg
Description:
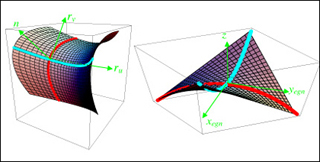
Parabolic approximation to a surface and local eigenframe. The surface on the left is a second-?order approximation of a surface at the point where the coordinate axes are drawn. The surface has a local normal at that point which is related to the cross product of the two tangents of the coordinate curves that cross at the that point. The three direction define a coordinate system. The coordinate system can be translated so that the origin lies at the point where the surface is expanded and rotated so that the normal n coincides with the z-axis as in the right hand curve. (Image by Prof. W. Craig Carter.)
file
70 kB
3-016f05.jpg
Alt text:
Parabolic approximation to a surface and local eigenframe.
Caption:
Parabolic approximation to a surface and local eigenframe. The surface on the left is a second-order approximation of a surface at the point where the coordinate axes are drawn. The surface has a local normal at that point which is related to the cross product of the two tangents of the coordinate curves that cross at the that point. The three directions define a coordinate system. The coordinate system can be translated so that the origin lies at the point where the surface is expanded and rotated so that the normal n coincides with the z-axis as in the right hand curve. (Image by Prof. W. Craig Carter.)
Course Info
Instructor
Departments
As Taught In
Fall
2005
Level
Learning Resource Types
notes
Lecture Notes
assignment_turned_in
Problem Set Solutions
assignment
Problem Sets







