Chad Keever, Projectile Launcher
Kendall McConnel, Control of a Plotter
Jonah Elgart, Guidance by IR Beacon
Miki Havlickova, IR Remote Control
Jessica Bowles-Martinez, Guidance by Light
Matt Seegmiller, Master/Slave IR Control
Jitin Asnaani, Invertible Robot
I’m Chad Keever, MIT class of 2001 and ESG alum/TA. This page is a description of my final project for SP.285, a seminar on Robotics and Mechatronics.
First, a little bit about the class (much of this is quoted from Kendall’s page of similar purpose)
The Robotics and Mechatronics seminar is taught in ESG by two spiffy fellows by the names of Eric Smith and Max “Ben” Davis. The course involves tinkering with Legos, motors, sensors and programming to create robots that can pick up, run away from light, or even follow a line. There were two major projects we worked on: the first was more structured and teamwork-related, and the second was the opposite (this project).
I love pretty much everything that is possible to do in this class, so my choice of what to work on for a final project was close to random. One of the suggested projects that looked like a lot of fun was building a robot capable of launching a projectile.
I could go on forever telling you how I came up with all the ideas behind this project, so I’ll just describe the hardest part. It was relatively easy to build the structure of the robot, the catapult mechanism, and the gears to pull it back. However, the hard part was how to release it suddenly enough to actually launch something. Simply untightening it just won’t work.
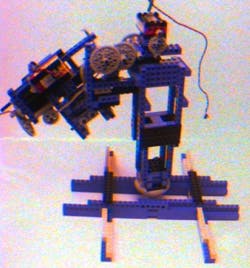
Being somewhat geometrically predisposed, the idea that eventually came into my head was to use a string, and have it make two legs of a triangle with the line between two places pulling on the string. When the axle holding it away from that line was removed, the string was suddenly released, launching the projectile. Perhaps the pictures below will illustrate this better. Observe my pretty little friend:

Winch mechanism for pulling back spring. |

Trigger mechanism for releasing spring. |

Aiming mechanism for adjusting vertical launch angle. |

A picture of the spring prepared for a launch. |