
Main | Hardware | System Model | Linearized Control | Nonlinear Control | Movies | Technical Details | Credits
MagLev Demonstration
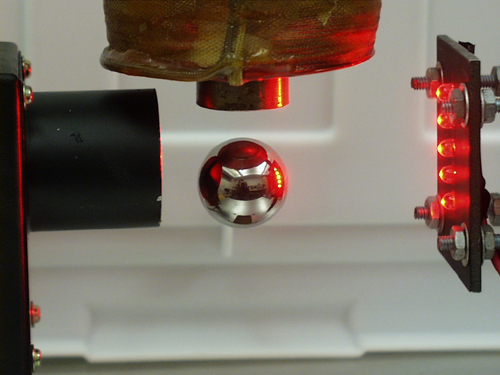
A steel ball bearing is suspended in air by an actively controlled electromagnet.
Movies of the MagLev in action.
The device shown above is an actively controlled magnetic levitator. Magnetic levitation is a technique widely used to create noncontact bearings. Such bearings eliminate friction and wear and also allow for operation at high speeds or in special environments such as vaccum systems. Maglev trains are perhaps the most visible application of the technology, their freedom from wheels making them capable of reaching speeds of over 350 mph.
This site looks at a levitator that is both a classroom-level demonstration of the principles involved in a maglev system and an experimental implementation of control mechanism for magnetic levitators. The system is first examined, then emphasis is placed on the methods by which such a system can be controlled and the hardware which can be used to implement such control.







